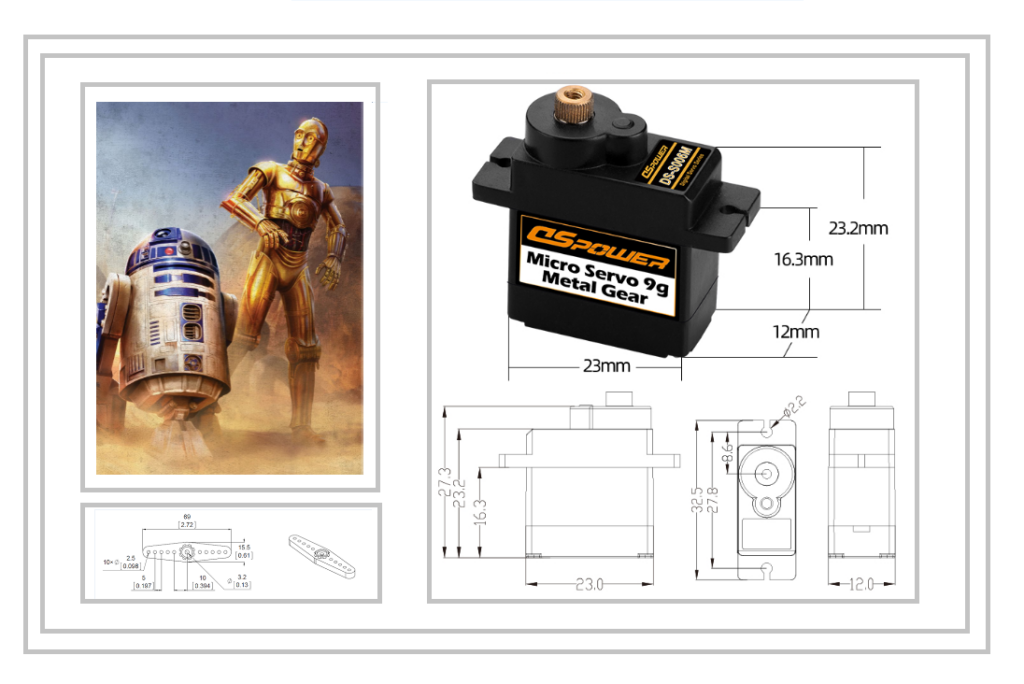
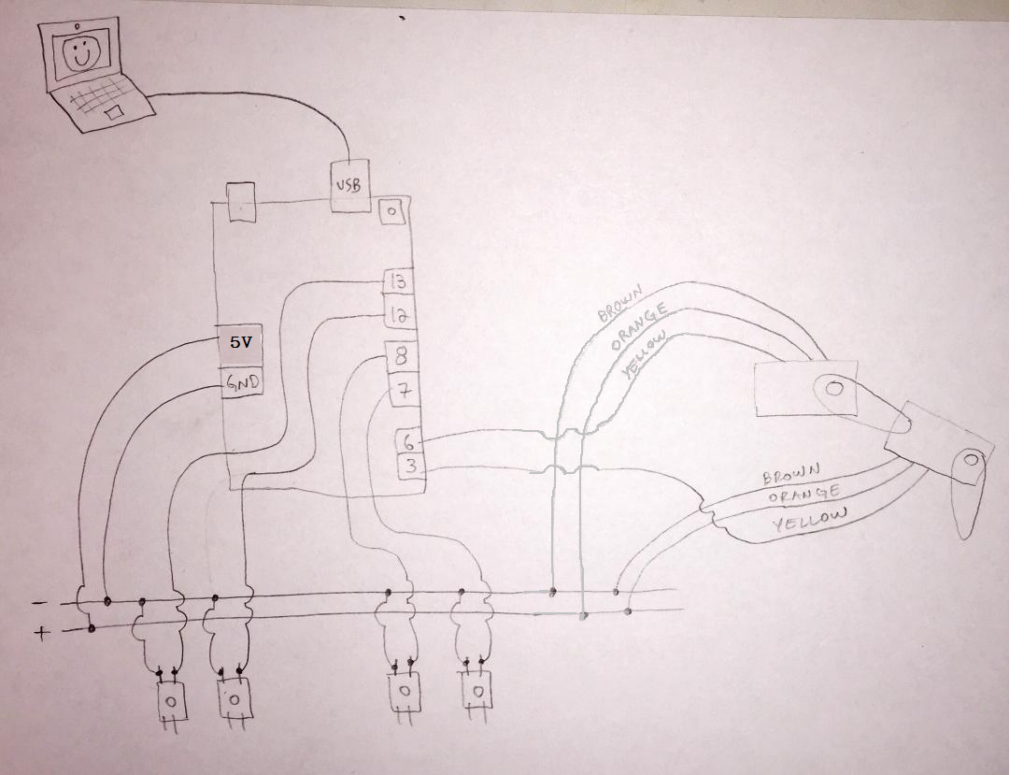
We are going to make a robot leq using an Arduino and 2 micro stepper motors. We will be connecting the two motors together using cool robot attachments.
Schematic
Arduino Code
// Aug 21 2021
// mini servo motor driver
//
//
// This program controls two servo motors
// Each servo motor has 180 degrees of motion
// The pushbuttons move the motor CW or CCW
//
//
//
// Servo Mtr Wiring
//
//
// Servo Mtr 1
//
// brwn --- GND
// red (middle) -- 3.3V
// org -- pin 6 (PWM)
//
//
// Servo Mtr 2
//
// brwn --- GND
// red (middle) -- 3.3V
// org -- pin 3 (PWM)
//
//
// controller wiring
//
// Mtr 1 2
// pin 13 12 8 7
// pb1 pb2 pb3 pb4
// motion cw ccw cw ccw
//
// This code is for an optional LED Display
//
//
// I2C 128X64 Micro OLED 4-Wire Yellow and Blue Display
// ****************************************************
// ****************************************************
// WIRING:
// Arduino Pins Micro Oled Pins
// A4 ---------------------------------- SCL
// A5 ---------------------------------- SDA
// 3.3V (NOT 5V!!!) -------------------- VCC (if you use 5V, Then you will get more PUL readings than you should. This is probably because impedence mismatch or too much current draw from the Arduino)
// GND --------------------------------- GND
//
//
// The first top 16 Pixel rows are yellow (x,y) (x,0) to (x,15)
// The next 48 Pixel rows are blue (x,y) (x,16) to (x,63)
// INCLUDE LIBRARIES
// *****************
#include <avr/interrupt.h>
#include <SPI.h>
#include <Wire.h>
#define SCREEN_WIDTH 128 // OLED display width, in pixels
#define SCREEN_HEIGHT 64 // OLED display height, in pixels
// The first top 16 Pixel rows are yellow (x,y) (x,0) to (x,15)
// The next 48 Pixel rows are blue (x,y) (x,16) to (x,63)
// Declaration for an SSD1306 display connected to I2C (SDA, SCL pins)
#define OLED_RESET -1 // Reset pin # (or -1 if sharing Arduino reset pin)
// VARIABLE DEFINITIONS
// ********************
int pin_12_13_enabled = 0;
int pin_7_8_enabled = 0;
// initially these values shoud be at a non load-bearing state
int pin_12_13_last_OCR1B = 2000;
int pin_7_8_last_OCR1B = 2000;
// VOLATILE
// used to allow instant changes in ISR
volatile int a = 0;
volatile int b = 0;
volatile int c = 0;
volatile unsigned long CNTR = 0;
unsigned long prior_CNTR = 0;
unsigned long new_CNTR = 0;
volatile int PUL = 0; //PUL from Mach 3
volatile bool DIR = true; //DIR from Mach 3 , Mach 3 sends a high or low voltalge signal to indicate direction , volatile is used to allow instant changes in ISR
volatile unsigned long CNT = 0; //CNT number of pulses counted from MACH III, volatile is used to allow instant changes in ISR
volatile unsigned long new_CNT = 0;
volatile unsigned long prior_CNT = 0;
volatile bool HA = false; //HA hall a from SERVO II
volatile bool HB = false; //HB hall b from SERVO II
volatile bool HI = false; //HI hall i from SERVO II
// START void setup()
// ******************************************************************************************************************************************
void setup()
{
//DDRD = B00000000; // set pin 3,5,6 as OUTPUTS
// SSD1306_SWITCHCAPVCC = generate display voltage from 3.3V internally
//DDRD = B00000000; // set pin 3,5,6 as OUTPUTS
//CLEAR THE ADAFRUIT LOGO
// Pin 7
pinMode(7, INPUT); // set pin A0 to input
digitalWrite(7, HIGH); // turn on pullup resistors on pin A0
// Pin 8
pinMode(8, INPUT); // set pin A0 to input
digitalWrite(8, HIGH); // turn on pullup resistors on pin A0
// Pin 12
pinMode(12, INPUT); // set pin 12 to input for OCR1B--
digitalWrite(12, HIGH); // turn on pullup resistors on pin 12
// Pin 13
pinMode(13, INPUT); // set pin 13 to input for OCR1B++
digitalWrite(13, HIGH); // turn on pullup resistors on pin 13
// DIR from Mach 3 --> ARDUINO
// HA, HB from SERVO II Motor
// this is for PCINT0-PCINT23
// **************************
cli(); // stop interrupts
//PCICR |= 0b00000111; // Enable Ports B, C, and D pin change interrupts
//PCICR |= 0b00000001; // Enable Ports B pin change interrupts
PCICR |= (1<<PCIE0);//enable group interrupts on PORTB PCINT[7:0]
//PCMSK0 |= 0b00000010; // DIR -> PCINT4 -> printed_pin_12
//PCMSK0 |= (1<<PCINT4);// DIR -> PCINT4 -> printed_pin_12
//PCMSK0 |= (1 << PCINT4); //Set PCINT0 (digital input 12) to trigger an interrupt on state change.
PCMSK0 |= (1<<PCINT4);//enable interrupt pin 12
//PCMSK1 |= 0b00000001; // HA -> PCINT13 -> printed_pin_A0
//PCMSK2 |= 0b10000000; // HB -> PCINT16 -> printed_pin_0
sei(); // start interrupts
// PUL from MachIII --> UC100-pin3 --> ARDUINO-pin2
// this is for INT0 = printed_pin_2
// UC100 pin is 3 the Arduino pin is 2
// ********************************
attachInterrupt (digitalPinToInterrupt (2), pulse, FALLING); // attach interrupt handler
// Serial.begin(9600);
// ARDUINO(pins3,5,6)5vOUTPUT --> MOSFETs(A,B,C)GATES --> SERVOII_Motor_Coils(A,B,C)
// *********************************************************************************
// The arduino will send 5V to the MOSFET gates by changing the DDRD ports 3,5,6 from 0 to 1
// PWM Duty Cycle
// **************
// 20 - 255 : 10% - 100%
// OC0A is pin 6 is PhA
// OC0B is pin 5 is PhB
// OC2B is pin 3 is PhC
// 100 good for x & y axis using 24 v ,130-140 good for z axis using 24v,
// 40 is good for z axis using 120v about 5 bumps per inch of travel
// 20 is better at 240volts 2 bumps per inch of travel
// note 3/31/2021: z axis has jumpy spots even using 120 volts. the wheel
// feels looser after lostening nuts on saddle that gous up and down and adding lube.
// I will probably mess with the OCRB stuffs
OCR0A = 255;
OCR0B = 255;
OCR2B = 255;
// Timer/Counter0
// *************
// pin5 & pin6
TCCR0A = _BV(COM0A1) | _BV(COM0B1) | _BV(WGM01) | _BV(WGM00); // Set bit to 1 at these locations
// set to clkio/64 to give 976.56Hz
//TCCR0B &= ~(1 << CS02); // set bit to 0
//TCCR0B |= (1 << CS01); // set bit to 1
//TCCR0B |= (1 << CS00); // set bit to 1
// set to clkio/1024 to give ???hz
TCCR0B |= (1 << CS02); // set bit to 1
TCCR0B &= ~(1 << CS01); // set bit to 0
TCCR0B &= ~(1 << CS00); // set bit to 0
// Timer/Counter2
// *****************
// pin3 & pin11
TCCR2A = _BV(COM2A1) | _BV(COM2B1) | _BV(WGM21) | _BV(WGM20); // Set bit to 1 where specified
// set to clkio/64 to give 980.39Hz
//TCCR2B |= (1 << CS22); // set bit to 1
//TCCR2B &= ~(1 << CS21); // set bit to 0
//TCCR2B &= ~(1 << CS20); // set bit to 0
// set to clkio/1024 to give ??HZ
TCCR2B |= (1 << CS22); // set bit to 1
TCCR2B |= (1 << CS21); // set bit to 1
TCCR2B &= ~(1 << CS20); // set bit to 0
// ALIGN MOTORS TO PHASE A
// ***********************
// phase A of Servo II corresponds to Arduino Digital Pin #6
/*
DDRD |= (1 << DDD3); //////////////////////////////////////////////////6 on
a = 1;
b = 1;
delay(50);
DDRD &= ~(1 << DDD3); //////////////////////////////////////////////////6 off
delay(100);
DDRD |= (1 << DDD3); //////////////////////////////////////////////////6 on
a = 1;
b = 1;
delay(50);
DDRD &= ~(1 << DDD3); //////////////////////////////////////////////////6 off
delay(100);
DDRD |= (1 << DDD3); //////////////////////////////////////////////////6 on
a = 1;
b = 1;
delay(50);
DDRD &= ~(1 << DDD3); //////////////////////////////////////////////////6 off
delay(100);
/*
DDRD |= (1 << DDD5); ///////////////////////////////////////////////// 5 on
a = 1;
b = 1;
delay(100);
DDRD &= ~(1 << DDD5); ///////////////////////////////////////////////// 5 off
delay(100);
DDRD |= (1 << DDD3); ///////////////////////////////////////////////// 3 on
a = 1;
b = 1;
delay(100);
DDRD &= ~(1 << DDD3); ///////////////////////////////////////////////// 3 off
*/
cli(); // stop interrupts
// Timer/Counter1
// *************
// This timer is in charge of triggering the SERVO II motor phase A, B, and C on and off
//set timer1 interrupt
TCCR1A = 0;// set entire TCCR1A register to 0
TCCR1B = 0;// same for TCCR1B
TCNT1 = 0;//initialize counter value to 0
// set compare match register for 1hz increments
// OCR1A must be < 65536
// t_on = OCR1B
// t_off = OCR1A - OCR1B
//OCR1A = 7875; // TEST ZONE works good on X-axis
OCR1A = 40000; // value of 30, z-axis -- as of Mar-2-2021 WORKS AWESOME on Z-axis: 1680 steps per inch, 1.5 in per min using 120 volts, 100 accel,
// ocr1a();
// set compare match register for 1hz increments
// OCR1B must be < 65536
// t_on = OCR1B
// t_off = OCR1A - OCR1B
// OCR1B = 6250; // TEST ZONE
OCR1B = 4000; // 700 to 5200 for MG90S
//ocr1b();
// turn on CTC mode
TCCR1B |= (1 << WGM12);
// Set CS12 bit for 8 prescaler
TCCR1B &= ~(1 << CS12) ; // set to 0
TCCR1B |= (1 << CS11) ; // set to 1
TCCR1B &= ~(1 << CS10) ; // set to 0
// enable timer compare interrupt
TIMSK1 |= (1 << OCIE1A); // OCR1A
// enable timer compare interrupt
TIMSK1 |= (1 << OCIE1B); // OCR1B
sei(); // start interrupts
}
// ***********************************************************************************************************************************************************
// END void setup()
// PCINT0
// ISR ISR ISR ISR ISR ISR ISR ISR ISR
// (ISR) Interrupt Service Routine (ISR)
// DIR -> printed_pin_12
// ************************************
//Serial.println("Inside ISR(PCINT0_vect)");
//DIR -> printed_pin_12
//+DIR -> printed_pin_12 is HIGH --> boolean true
//-DIR -> printed_pin_12 is LOW --> boolean false
//int DIR = true default value at start-up
//int new_DIR = 0; default value at start-up
//int prior_DIR = 0; default value at start-up
// the pin on UC100 is 2 and the pin on Arduino is 12
ISR(PCINT0_vect)
{
// DIR = !DIR;
// if(PINB & (1 << 4)) // if pin 12 -> DIR is 5V
// Serial.println(DIR);
}
// PCINT1
// ISR ISR ISR ISR ISR ISR ISR ISR ISR
// (ISR) Interrupt Service Routine (ISR)
// HA -> printed_pin_A0
// *************************************
//ISR(PCINT1_vect)
//{
// HA -> printed_pin_A0
//}
// ISR ISR ISR ISR ISR ISR ISR ISR ISR
// (ISR) Interrupt Service Routine (ISR)
// HB -> printed_pin_A0
// *************************************
//ISR(PCINT2_vect)
//{
// HB
//}
// ISR ISR ISR ISR ISR ISR ISR ISR ISR
// (ISR) Interrupt Service Routine (ISR)
// *************************************
//pulse_counter ++; inside voide pulse()
void pulse()
{
CNTR++;
CNT++;
}
// FUNCTION
// ********
void read_write_inputs()
{
// MACH 3 STEP PULSES sent to SERIAL MONITOR
new_CNT = CNT;
if (new_CNT != prior_CNT)
{
//Serial.println("Inside void read_write_inputs()")
//Serial.print("CNT: ");
//Serial.println(new_CNT);
prior_CNT = new_CNT;
//delay(10); // print at reasonable speed
}
// MACH 3 DIR sent to SERIAL MONITOR
if(PINB & (1 << 4)) // if pin12/DIR is 5V
{
DIR = 1;
}
else
{
DIR = 0;
}
}
//
// -------------------------------
void ocr1a(void)
{
OCR1A = 40000;
}
//
// -------------------------------
void ocr1b(void)
{
//700 - 5200
OCR1B = 2000 ;
}
// TIMER 1 COMPA OCR1A
// (ISR) Interrupt Service Routine (ISR)
// ************************************
ISR(TIMER1_COMPA_vect)
{
if(pin_12_13_enabled == 1)
{
DDRD |= (1 << DDD6); ///////////////////////////////////////////////// 6 on
}
else if(pin_7_8_enabled == 1)
{
DDRD |= (1 << DDD3); ///////////////////////////////////////////////// 3 on
}
}
// END ISR(Timer1_COMPB_vect)
// TIMER 1 COMPB OCR1B
// (ISR) Interrupt Service Routine (ISR)
// ************************************
ISR(TIMER1_COMPB_vect)
{
if(pin_12_13_enabled == 1)
{
DDRD &= ~(1 << DDD6); ///////////////////////////////////////////////// 6 off
}
else if(pin_7_8_enabled == 1)
{
DDRD &= ~(1 << DDD3); ///////////////////////////////////////////////// 3 off
}
}
// END ISR(Timer1_COMPA_vect)
// MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP
// ********* ********* ********* ********* ********* ********* ********* ********* ********* ********* ********* ********* ********* *********
void loop()
{
//read_write_inputs(); // Arduino to Serial Monitor
//display_HMI_text(); // Arduino to HMI
// Check the state of input pin 12 from the push button
if (!digitalRead(12))
{
OCR1B = pin_12_13_last_OCR1B;
pin_12_13_enabled = 1;
pin_7_8_enabled = 0;
if (OCR1B > 700)
{
delay(10);
OCR1B = OCR1B - 25;
pin_12_13_last_OCR1B = OCR1B;
}
}
// Check the state of input pin 13 from the push button
else if (!digitalRead(13))
{
OCR1B = pin_12_13_last_OCR1B;
pin_12_13_enabled = 1;
pin_7_8_enabled = 0;
if (OCR1B < 4500)
{
delay(10);
OCR1B = OCR1B + 25;
pin_12_13_last_OCR1B = OCR1B;
}
}
else if (!digitalRead(7))
{
OCR1B = pin_7_8_last_OCR1B;
pin_7_8_enabled = 1;
pin_12_13_enabled = 0;
if (OCR1B >= 700)
{
delay(10);
OCR1B = OCR1B - 25;
pin_7_8_last_OCR1B = OCR1B;
}
}
// Check the state of input pin 8 from the push button
else if (!digitalRead(8))
{
OCR1B = pin_7_8_last_OCR1B;
pin_7_8_enabled = 1;
pin_12_13_enabled = 0;
if (OCR1B <= 5200)
{
delay(10);
OCR1B = OCR1B + 25;
pin_7_8_last_OCR1B = OCR1B;
}
}
// new_CNTR = CNTR;
// if (new_CNTR != prior_CNTR)
// {
// Serial.println(new_CNTR);
// prior_CNTR = new_CNTR;
// delay(10); // print at reasonable speed
// }
}
// MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP MAIN LOOP
// ********* ********* ********* ********* ********* ********* ********* ********* ********* ********* ********* ********* ********* *********